موتور تنظیم سرعت الکترومغناطیسی سری YCT
بررسی اجمالی محصولات
موتور سرعت الکترومغناطیسی سری YCT یک موتور گشتاور ثابت AC با سرعت متغیر است. از طریق کلاچ الکترومغناطیسی ، موتور محرک و تاکوژنراتور ، معمولاً با کنترلر سری JD ، TXZ ، CTK که از مجموعه ای از مبادله تشکیل شده است ، یک سیستم بازخورد منفی سرعت سنجی بدون قدم دارد. درایو ، یک سرعت وسیع تنظیم سرعت بدون گام ، در چین ، موتور الکترومغناطیسی با طراحی یکپارچه دارای مزایای راندمان بالا ، سر و صدای کم ، ارتعاش ، قابلیت اطمینان بالا و ظاهر زیبایی است. و مطابق با کمیسیون ملی بین المللی الکتروتکنیک ( استانداردهای IEC). موتور فرمان الکترومغناطیسی سری به طور گسترده ای در نساجی ، چاپ و رنگرزی ، انواع مواد غذایی ، شیمیایی ، کاغذ ، سیمان ، لاستیک ، پلاستیک ، کابل ، متالورژی ، معدن و سایر مناطق با سرعت گشتاور ثابت گشتاور ، به ویژه برای فن ها ، پمپ ها ، مواقع کاهش گشتاور بار ، کنترل سرعت تنظیم تغییرات فشار جریان برای به دست آوردن یک اثر صرفه جویی قابل توجه انرژی.
موتور ناهمزمان تنظیم کننده سرعت الکترومغناطیسی از موتور ناهمزمان معمولی قفس سنجابی ، کلاچ لغزش الکترومغناطیسی و دستگاه کنترل الکتریکی تشکیل شده است. موتور ناهمزمان به عنوان محرک اصلی استفاده می شود. هنگامی که می چرخد ، آرماتور کلاچ را به حرکت در می آورد. دستگاه کنترل الکتریکی دستگاهی است که جریان تحریک سیم پیچ تحریک کلاچ لغزش را تأمین می کند. کلاچ لغزش الکترومغناطیسی عمدتا در اینجا معرفی شده است و ساختار آن در شکل 2-19 نشان داده شده است. شامل آرماتور ، قطب مغناطیسی و سیم پیچ تحریک است. آرماتور یک ساختار استوانه ای ساخته شده از فولاد چدنی است که با محور چرخشی موتور ناهمزمان قفس سنجابی که معمولاً به عنوان قسمت فعال شناخته می شود ، متصل است. قطب مغناطیسی به صورت یک ساختار پنجه ای ساخته شده و بر روی شافت بار نصب می شود ، که معمولاً به عنوان قسمت رانده شده شناخته می شود. هیچ ارتباط مکانیکی بین قسمت رانندگی و قسمت رانده شده وجود ندارد. هنگامی که سیم پیچ تحریک از جریان عبور می کند ، میدان مغناطیسی ایجاد می شود و ساختار پنجه جفت قطب های مغناطیسی زیادی را تشکیل می دهد. در این زمان ، اگر آرمیچر توسط موتور ناهمزمان قفس سنجابی کشیده و بچرخد ، برهم کنش میدان مغناطیسی را قطع کرده و گشتاور ایجاد می کند ، بنابراین قطب مغناطیسی قسمت رانده شده با آرماتور قسمت محرک می چرخد. سرعت اولی کمتر از دومی است ، زیرا آرماتور می تواند تنها در مواقعی که حرکت نسبی بین آرمیچر و میدان مغناطیسی وجود دارد ، خط مغناطیسی نیرو را قطع کند. هیچ تفاوتی اساسی بین این اصل وجود ندارد که قطب مغناطیسی با آرمیچر می چرخد و این که روتور یک موتور ناهمزمان معمولی با میدان مغناطیسی دوار سیم پیچ استاتور حرکت می کند ، هیچ تفاوت اساسی ندارد. تفاوت این است که میدان مغناطیسی دوار موتور ناهمزمان توسط AC سه فاز در سیم پیچ استاتور ایجاد می شود ، در حالی که میدان مغناطیسی کلاچ لغزش الکترومغناطیسی توسط جریان DC در سیم پیچ تحریک ایجاد می شود ، و به دلیل اینکه آرمیچر می چرخد ، نقش میدان مغناطیسی دوار را ایفا می کند. 1 - حرکت کننده اصلی ، 2 - فاصله هوای کار ، 3 - شفت اصلی ، 4 - شفت خروجی ، 5 - قطب مغناطیسی ، 6 - ویژگی های مکانیکی کلاچ لغزش الکترومغناطیسی آرمیچر را می توان تقریباً با فرمول تجربی زیر بیان کرد: n = n0 -kt2 / i4f ، جایی که: N0 - سرعت حرکت بخشی از کلاچ (موتور قفس سنجابی) ؛ N - سرعت قسمت رانده شده (قطب مغناطیسی) کلاچ ؛ اگر
موتور خطی کتابخانه - موتور Dongfang تبلیغات مستقیماً توسط موتور Dongfang ژاپن اداره می شود. موتور خطی نازک ، سختی بالا و دقت بالا است. موتور خطی مستقیماً با نرم افزار رایگان ویژه ، مشاهده جزئیات> مطابقت دارد
- جریان تحریک ؛ K - ضریب مربوط به ساختار کلاچ ؛ T - گشتاور الکترومغناطیسی کلاچ. هنگام حرکت پایدار ، گشتاور بار برابر با گشتاور الکترومغناطیسی کلاچ است.
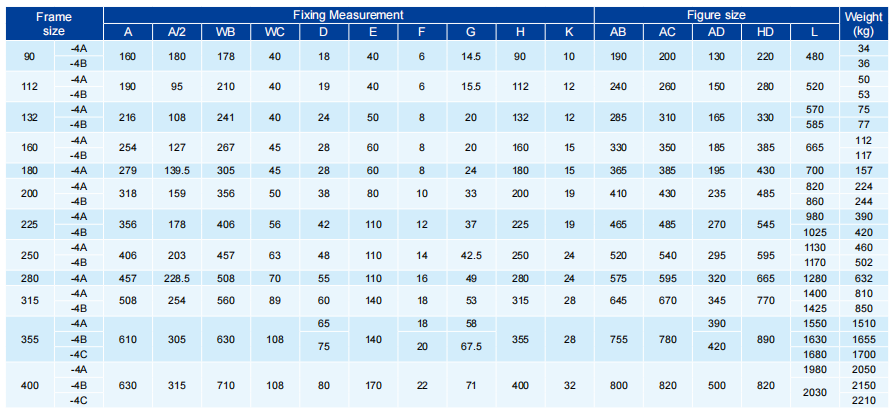
ابعاد نصب
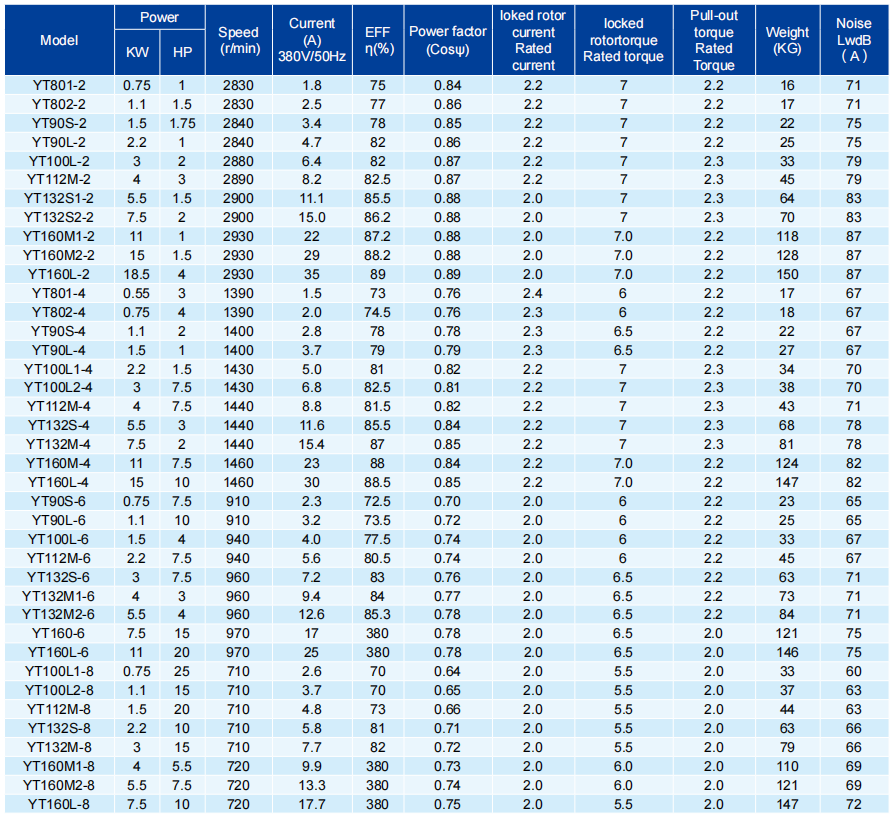
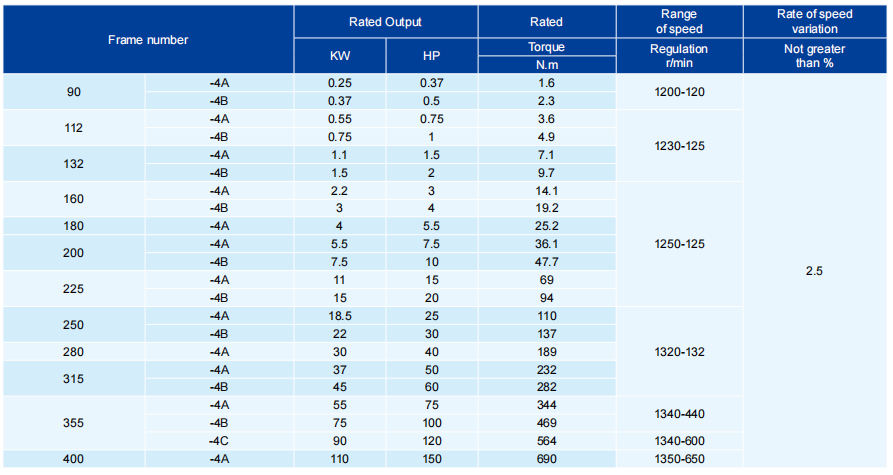
پارامتر فنی

پارامترهای فنی